



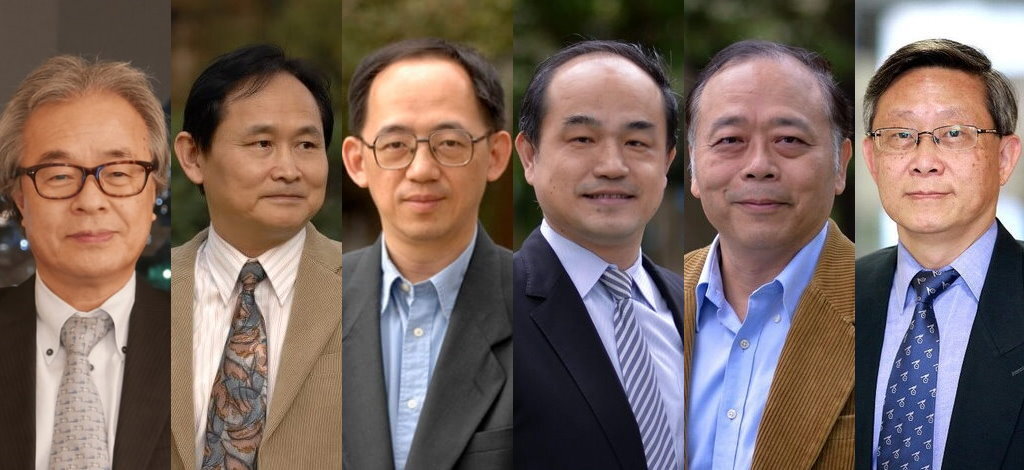
全球前2%頂尖科學家
北森武彥教授, 劉通敏教授, 方維倫教授, 李國賓教授, 白明憲教授, 賀陳弘教授

|

|

|
DIT Robotics
We Do, Imrpove and Try

了解更多

動機系人事升遷


了解更多

陳榮順教授
112年教育部師鐸獎

北森武彥教授
KISTEC 理事長
NTHU Racing
2023 fsczech 🇨🇿
